Détermination des fonctions de transfert
Une fonction de transfert doit être exprimée sous la forme de fraction rationnelle en p, c'est à dire comme le quotient de 2 polynômes en p ordonnés selon les puissances croissantes de p
ex. \(H(p){=\frac{a+bp+...}{1+\alpha p+\beta p^2+\gamma p^3+...}}\)
L'ordre d'une fonction de transfert est le degré du polynôme du dénominateur
Elle peut être donnée par le constructeur
Elle peut être déterminée à partir des équations différentielles en remplaçant l'opérateur "dérivée" par la variable p
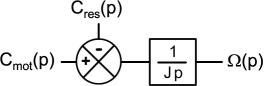
par exemple pour un moteur : \(J{\frac{d\Omega(t)}{dt}}{=C_{mot}(t)-C_{res}(t)}\) se traduit par \(J p \Omega (p)=C_{mot}(p)-C_{res}(p)\)
Soit \(\Omega (p)={\frac{1}{J p}}{(C_{mot}(p)-C_{res}(p))}\)
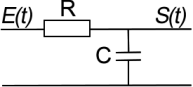
Elle peut être déterminée à partir des fonctions de transfert calculées en électronique par exemple en remplaçant la variable jω par l'opérateur p
\({\frac{S(j\omega)}{E(j\omega)}=\frac{1}{1+jRC\omega}}\) se traduit par \({\frac{S(p)}{E(p)}=\frac{1}{1+RCp}}\)
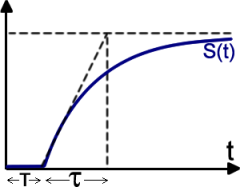
Elle peut être identifiée expérimentalement en effectuant un test de réponse à un échelon
Par exemple la méthode de
« BROÏDA »
consiste à assimiler le procédé à un système du premier ordre de constante de temps \(\mathcal{T}\) avec un retard T : \({F(p) =}{ \frac{e^{-TP}}{1+\mathcal{T} p}}\)A partir des valeurs mesurées de T et \(\mathcal{T}\), un tableau nous fournit les paramètres "optimaux" d'un correcteur PID